第一作者:刘静
通讯作者:罗坚义、陈智明
背景介绍及内容概述:
从启蒙时代开始,人类就一直在试图开发机器来代替人类执行繁重、乏味或不安全的操作。仿生机器人是机电智能的杰出代表,它融合了仿生学、机械工程、计算机科学、人工智能、传感和驱动等先进科学技术。仿生机器人具有与人类相似的外形和配置,能够适应人类的生活和工作环境,使用人类使用的工具工作。传感和智能控制技术的进步使仿生机器人能够通过模仿人类简单的行走动作来适应外部环境。然而,仿生机器人的运动仍然是脱节的(见图1a),缺乏人类运动的灵活性和自主性。
为了使仿生机器人的运动接近人类,需要对人类的运动进行捕捉并转换为数字学习模型。目前开发的运动捕捉系统有五种类型:机械、电磁、声学、光学系统和惯性运动捕捉系统。由于机械测量设备的灵活性差、精度低、对周围环境电磁波产生的要求高,以及超声检测的时延大、分辨率低等原因,机械、电磁和声学运动捕捉系统在实际应用中很少出现。光学动作捕捉系统是目前最成熟、最准确的动作捕捉技术,已广泛应用于运动分析、虚拟现实(VR)、人机交互等领域。高速摄像机在光学动作捕捉系统中发挥着关键作用,它通过捕捉运动中的人体标记并将图像传输到中央处理器(CPU),通过数据融合对标记物的位置信息进行解析,模拟人体姿态。高速摄像机安装在运动空间,而不是安装在人体上,所以人可以自由移动。然而,运动空间的低亮度和不规则照明限制了光学运动捕捉系统的应用。此外,光学运动捕捉系统只能提供关于人体运动姿势的信息,但不能提供关于运动机制的深入信息,这对于仿人机器人学习人类行为是很重要的。惯性动作捕捉系统基于微机电系统(MEMS)惯性传感器,通过测量人体在空间坐标系中沿X、Y、Z轴的加速速度和角速度数据来反映运动特性。MEMS惯性传感器具有体积小、功耗低、信噪比高的优良特性,在运动捕捉中得到了广泛的关注。然而,MEMS惯性传感器由于其固有的刚性,与人体皮肤的兼容性较差,从而限制了人体的运动自由。为增加与人体皮肤的兼容性,各类柔性应变传感器被开发用于运动捕捉,目前的研究已实现对皮肤拉伸和关节弯曲做出响应,从而检测人类的动作,如手势、抓取、行走和跑步等。但这些应变传感器依赖于传感材料的可拉伸性,对人体的细微应变运动(如肌肉收缩)的检测并不灵敏。因此,开发一种高灵敏度的柔性应变传感器,能够捕捉和数字化人体运动,使仿生机器人学习人类行为仍然是一个挑战(如图1b和1c所示)。
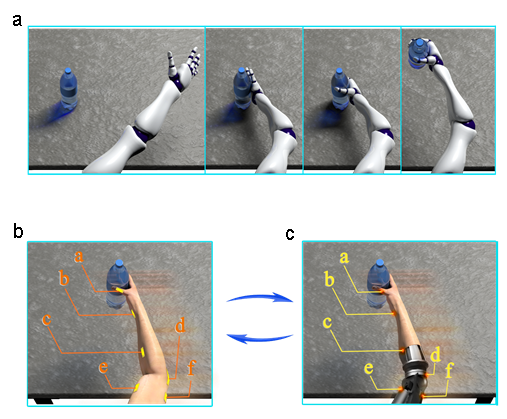
图1 面对仿生机器人的数字化运动 a)仿生机器人抓取对象的动作分解图;b)人体抓取对象的运动状态和传感器分布在人体上肢的位置;c)未来仿生机器人抓取物体的运动状态及传感器对应的位置。
鉴于此,五邑大学应用物理与材料学院、柔性传感材料与器件研究开发中心罗坚义教授、陈智明博士带领团队针对未来仿生机器人的运动形态,开发了一种可以将人体动作数字化的弯曲传感器,以建立一个学习平台,使仿生机器人以更接近人类运动的方式移动。该弯曲传感器由碳纤维材料制成,采用级联结构,具有良好的定量检测能力、高GF、低迟滞、长期耐用和高频响应等特点。因此,弯曲传感器既可以识别关节弯曲的大尺度运动,也可以识别肌肉收缩的细微运动。与人手的14个指关节相对应的14个弯曲传感器,可以准确地识别和数字化手势。这些多通道传感器与另外9个弯曲传感器相结合,全面数字化人类上肢的抓取过程,并识别不同大小和重量的抓取物体。这些成功的应用表明,弯曲传感器可以将人体运动数字化,为仿生机器人打开了一扇学习人类行为的窗口。本文以“Digitizing the human motion via bending sensors toward humanoid robot”为题已发表在Advanced Intelligent Systems期刊上。
论文具体内容:
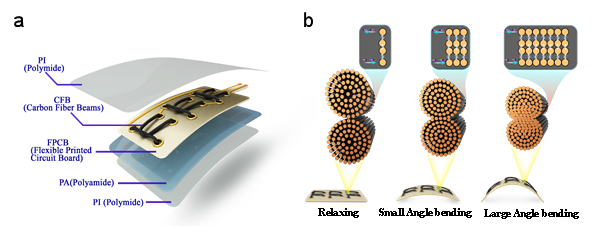
图2 碳基柔性弯曲传感器的结构模型 a)碳基柔性弯曲传感器的结构示意图;b)碳基柔性弯曲传感器工作原理。
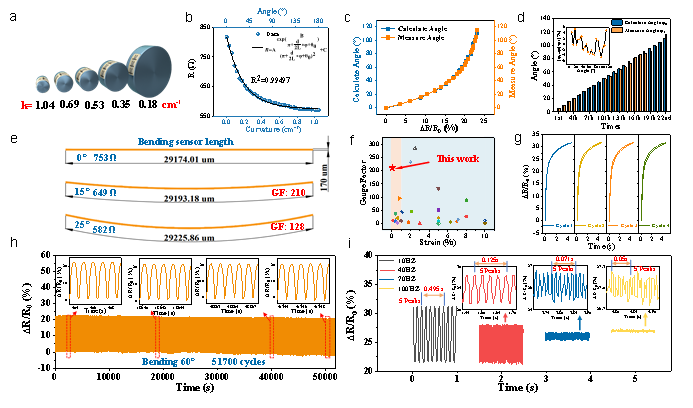
图3 碳基柔性弯曲传感器的性能特点 a)碳基柔性弯曲传感器固定在不同曲率的圆柱体表面上,用于监测传感器的电阻响应;b)电阻随曲率(弯曲角度)变化的数据及拟合曲线;c)传感器的弯曲角度与电阻变化率的关系;d)计算角度与实测角的绝对误差图和百分比误差图;e)弯曲15°和25°时传感器应变示意图;f)0-10%应变范围下传感器的GF值;g)加载-卸载循环过程中弯曲传感器电阻变化率的实时变化;h)碳基柔性弯曲传感器在60°弯曲50,000次循环下的电阻响应;i)碳基柔性弯曲传感器在不同响应频率(0-100Hz)下的电阻响应。

图4 碳基柔性弯曲传感器实时监测人体运动 a)人体手指关节弯曲运动示意图;b)手指关节弯曲时的电阻响应变化;c)肘部弯曲时肌肉收缩和松弛示意图;d)站立哑铃卷曲动作时的电阻响应变化。
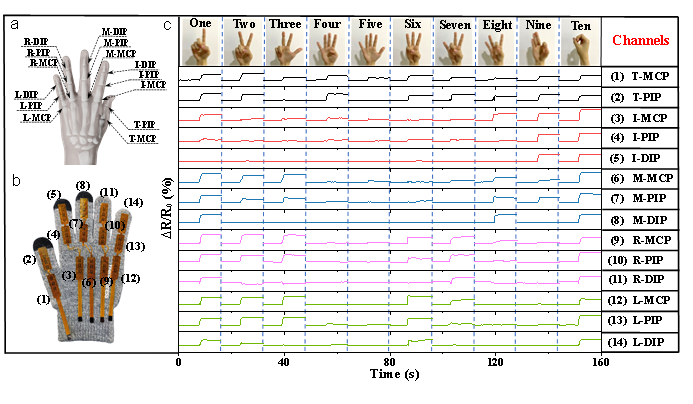
图5 多通道碳基柔性弯曲传感器的手势识别和数字化 a)人手关节结构示意图;b)集成14个碳基柔性弯曲传感器的可穿戴数据手套示意图;c)从数字1到数字10手势对应的14个碳基柔性弯曲传感器的电阻变化率响应的实时演化。
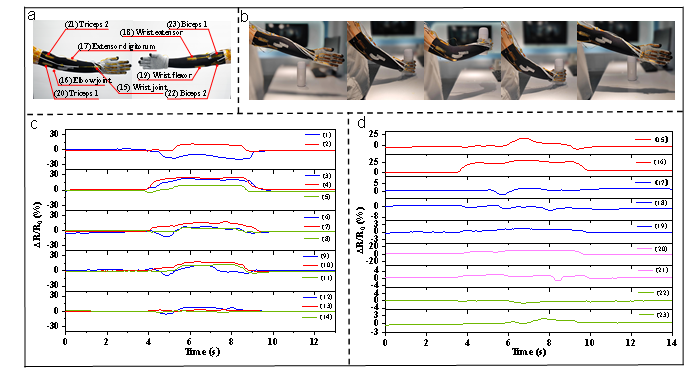
图6 多通道碳基柔性弯曲传感器抓握过程的数字化 a)上肢数据采集设备示意图;b)人类上肢抓取对象的整个过程的流程图;c)在抓取过程中14个传感器(针织手套)对应的电阻变化率响应的实时演化;d)在抓取过程中9个传感器(袖口)对应的电阻变化率响应的实时演化。
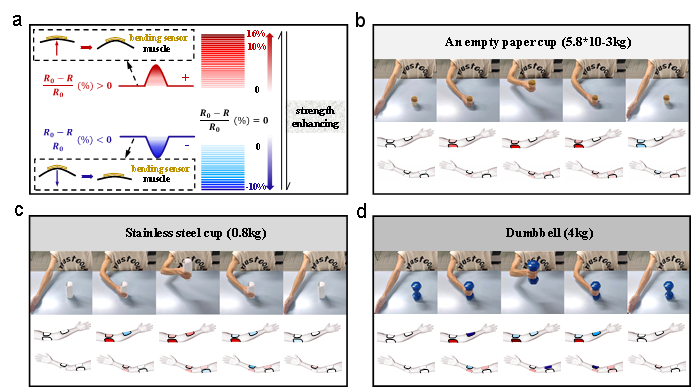
图7 上肢肌肉抓取不同物体时信号的变化 a)电阻变化率与色深的映射关系;b)抓取纸杯时肌肉所对应的HSB反应示意图;c)抓取不锈钢杯时肌肉所对应的HSB反应示意图;d)抓取哑铃时肌肉所对应的HSB反应示意图。
总结与展望
本文开发了一种基于碳纤维材料、采用级联结构的柔性弯曲传感器,用于人体运动数字化。该碳基柔性弯曲传感器具有能够定量测量弯曲角度、在小应变下的GF高达210、低迟滞、长期动态弯曲耐久性和高频响应等优良特性。这些特征使传感器能够识别关节弯曲的大范围运动和肌肉收缩的细微运动。与人手的14个关节相对应的14个弯曲传感器能够识别从1到10的手势,证明了弯曲传感器在手势识别和人体运动数字化方面的能力。将这14个弯曲传感器与另外9个安装在手腕关节、肘关节和上肢最活跃的肌肉上的传感器相结合,实现了握杯动作的全面数字化。肌肉收缩的细微运动数据提供了抓取不同大小和重量物体时的运动反馈。实验结果证明,碳基柔性弯曲传感器是实现人体运动数字化的关键工具,为未来仿生机器人提供了学习平台。
作者团队介绍
第一作者:刘静,女,五邑大学应用物理与材料学院材料与化工专业在读硕士研究生。
通讯作者:罗坚义,男,工学博士,教授,博士生导师,现任五邑大学应用物理与材料学院院长,五邑大学柔性传感材料与器件研究开发中心主任(创始人),广东省杰出青年基金获得者,国家重点研发计划智能传感重点专项会评专家,南粤优秀教师, 江门市首届 “侨乡青年榜样”,江门市优秀科技工作者。主要研究领域包括:柔性传感材料与器件应用(柔性触觉传感、温度传感、气压传感和弯曲传感等);纳米功能材料合成;智能调光变色材料与器件。
通讯作者:陈智明,男,工学博士,讲师,硕士生导师。2019年毕业于华南理工大学获博士学位,工作以来一直从事柔性传感器的材料开发、器件制备及其应用研究。
附文献及DOI号:
Digitizing the human motion via bending sensors toward humanoid robot.
DOI:10.1002/aisy.202200337